Lightning Warning Box: Field Build Journal + Technical Guide
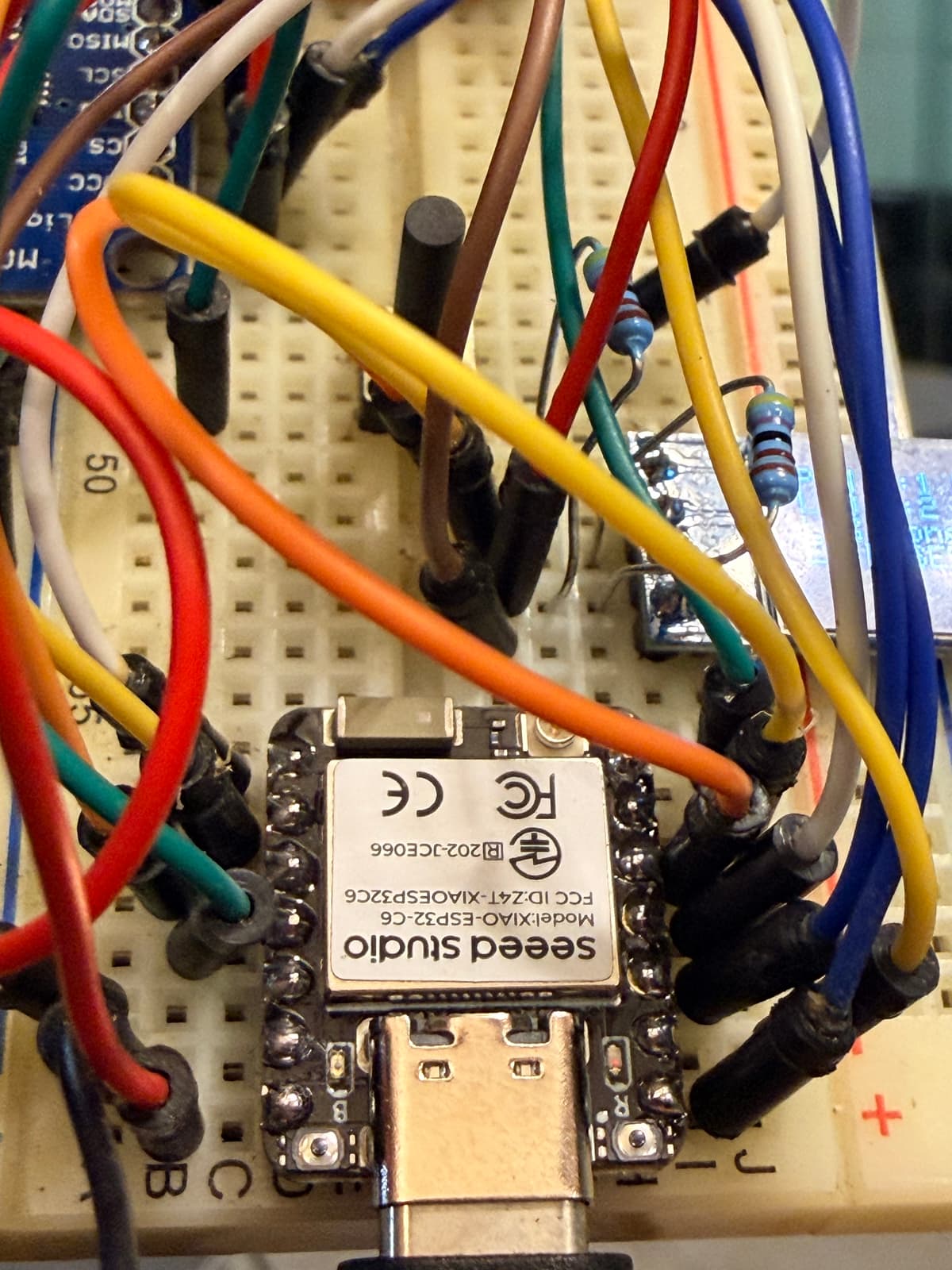
A running build journal for the XIAO ESP32-C6 + AS3935 lightning warning box, with full wiring, build decisions, troubleshooting notes, and current firmware state.
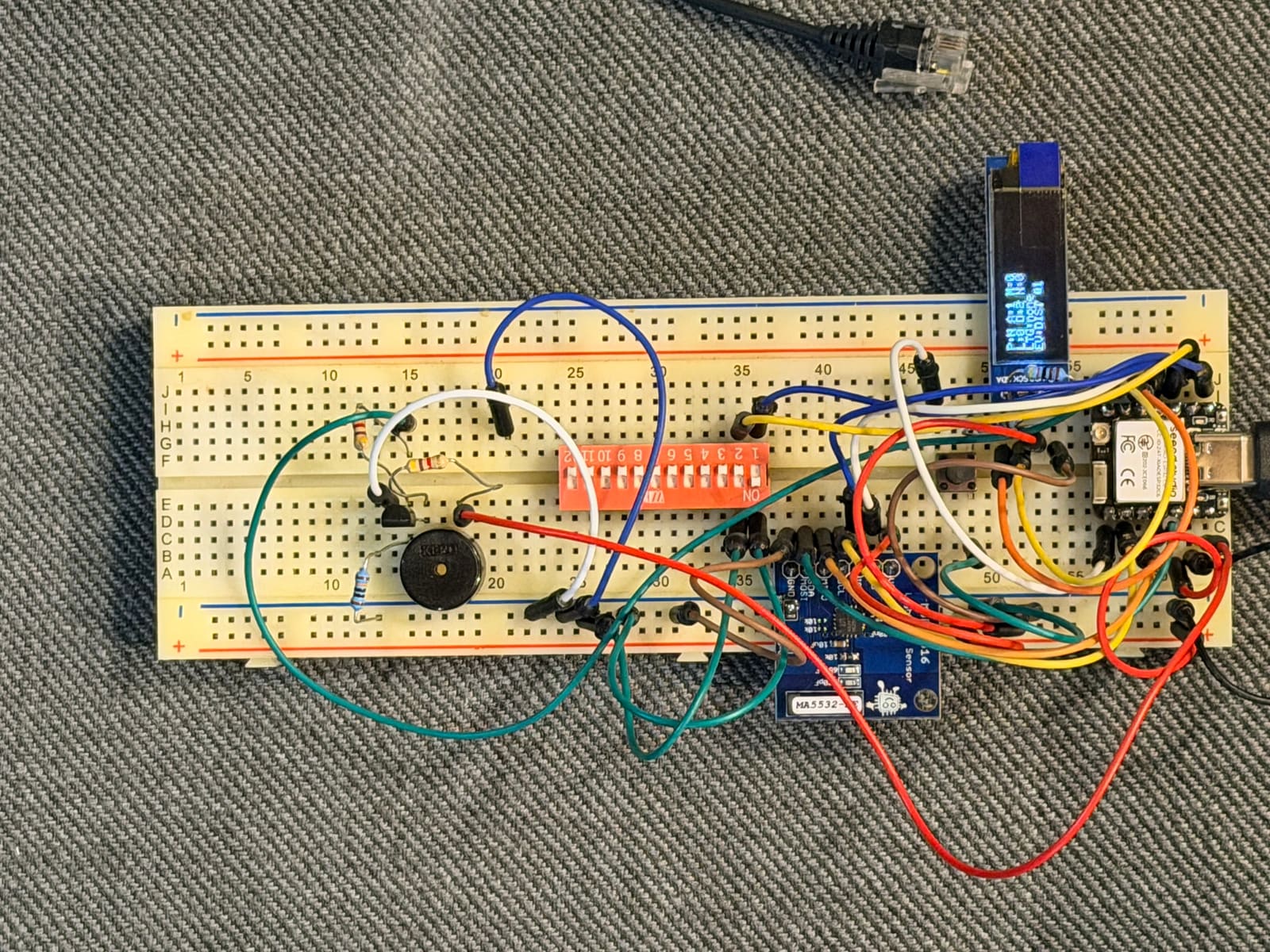
This project is a lightning warning box for radio operations, built on the bench and tested for field use. The goal has stayed simple from day one: detect nearby electrical activity reliably, show status clearly on-device, and keep an audible alert path that still works when bench conditions get noisy.
M1: Sensor Path Locked
SPI + IRQ bring-up is stable. Event decode for NOISE, DISTURBER, and LIGHTNING is confirmed.
Reference: firmware/m1_bringup/m1_bringup.ino
M2: Operator UX Verified
OLED status, ARM/MUTE/RESET debounce, profile switching, and event buffer behavior were all confirmed on real hardware (2026-03-08 00:19 AEST).
Reference: firmware/m2_core/m2_core.ino (M2_CORE_R3_2026-03-07)
M3: Connectivity Started
Wi-Fi + NTP + NVS strike logging + HTTP endpoints are in the first connected build (started 2026-03-08 00:44 AEST).
Reference: firmware/m3_connected/m3_connected.ino (M3_CONNECTED_R1_2026-03-08)
What We Learned on the Bench
NOISY profile is essential on high-EMI benches. Passive piezo alert path required a collector pull-up; +5V -> 4.7k -> collector is current recommendation.
These two changes removed most false negatives during validation.
Build Journal (From the Project Log)
Open each M1 / M2 / M3 block to read the notes and inspect the full code used in that stage.
M1: Sensor Bring-Up and Bench StabilityComplete
M1 locked in the electrical and firmware basics: SPI + IRQ wiring, stable event decoding, and repeatable bring-up behavior on the XIAO ESP32-C6 + AS3935 setup.
Most of this milestone was cleanup work. Board targeting was tightened, calibration and tuning were made explicit, and fault output was standardized so failures are easier to diagnose.
- Board profile corrected for clean compile/upload flow.
- AS3935 tuning and oscillator calibration integrated.
- Profiles introduced for noisy vs sensitive benches.
- Hex fault code base (
0x1XX).
Open M1 Code: m1_bringup.ino
#include <Arduino.h>
#include <SPI.h>
#include <Wire.h>
#include "SparkFun_AS3935.h"
// AS3935 event bits
#define LIGHTNING_INT 0x08
#define DISTURBER_INT 0x04
#define NOISE_INT 0x01
#define INDOOR 0x12
#define OUTDOOR 0x0E
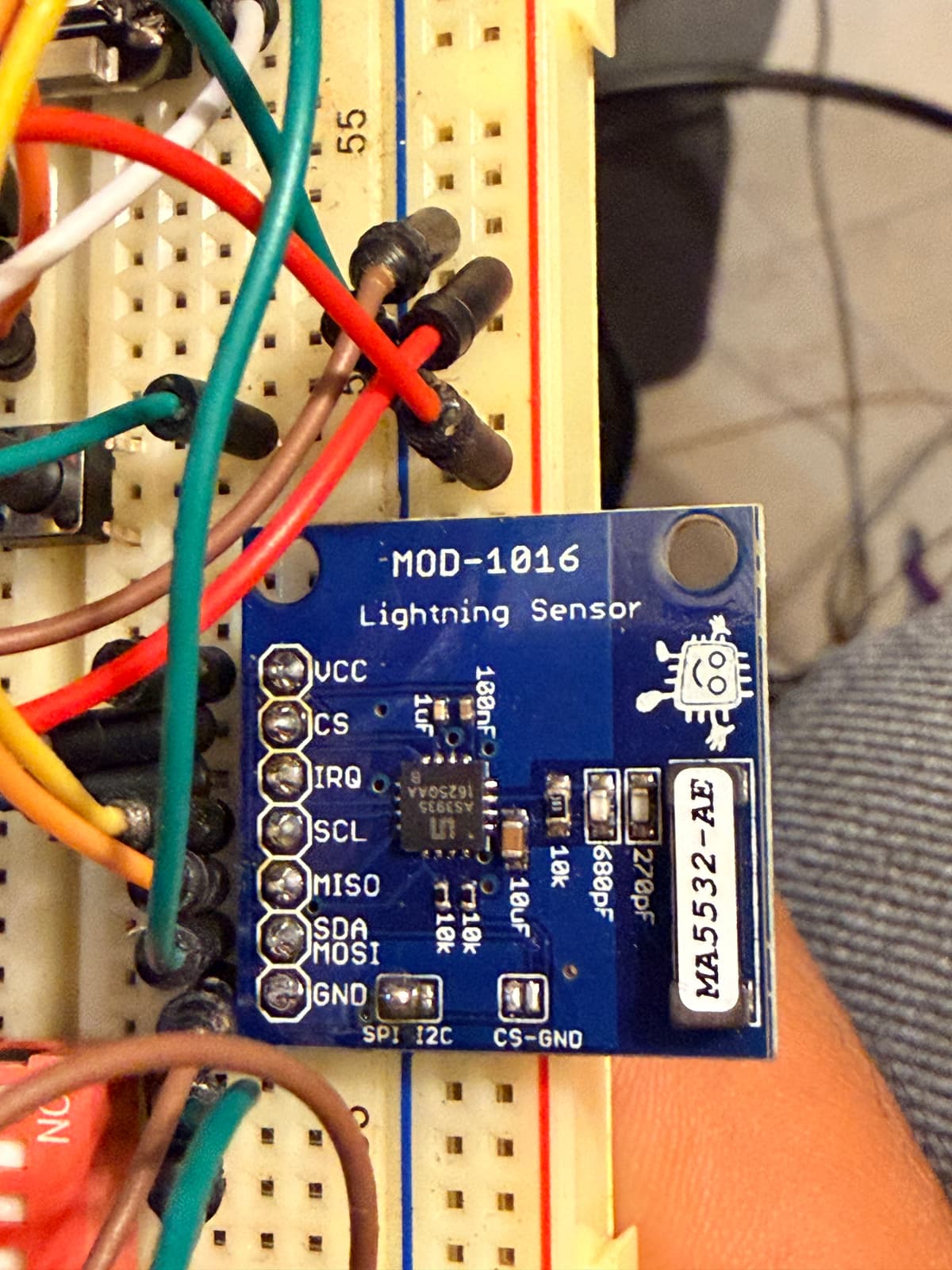
// MOD-1016 documentation provides a factory calibration number as TUNE_CAP bits
// (Register 0x08 bits [3:0]), typically noted on the anti-static package.
// Valid range: 0..15, where pF value = bits * 8.
static constexpr uint8_t SENSOR_TUNE_CAP_BITS = 7; // manufacturer-provided value
// Optional boot-time profile select:
// false = always use default profile below
// true = if MUTE switch is ON at boot, use noisy-bench profile
static constexpr bool ENABLE_PROFILE_SELECT_SWITCH = true;
enum SensorProfile : uint8_t {
PROFILE_SENSITIVE = 0, // preferred for detecting weak nearby bench triggers
PROFILE_NOISY = 1 // preferred when ambient EMI is flooding NOISE IRQ
};
// Default deployment profile (no switch required).
static constexpr SensorProfile SENSOR_PROFILE_DEFAULT = PROFILE_SENSITIVE;
struct SensorParams {
uint8_t afe_mode;
uint8_t noise_floor;
uint8_t watchdog;
uint8_t spike;
uint8_t min_lightnings;
const char* name;
};
const SensorParams PARAM_SENSITIVE = {
INDOOR, // higher gain
2, // lower threshold
1, // higher sensitivity
1, // higher sensitivity
1, // fastest trigger
"SENSITIVE"};
const SensorParams PARAM_NOISY = {
OUTDOOR, // lower gain
7, // tolerate ambient noise
6, // stricter
6, // stricter
1, // keep single-event trigger for now
"NOISY"};
SensorParams g_sensor = PARAM_SENSITIVE;
// Pin map (XIAO ESP32-C6 lean SPI build)
static constexpr uint8_t PIN_ARM_SW = D0; // INPUT_PULLUP, ON = GND
static constexpr uint8_t PIN_MUTE_SW = D1; // INPUT_PULLUP, ON = GND
static constexpr uint8_t PIN_AS3935_IRQ = D2; // external interrupt pin
static constexpr uint8_t PIN_AS3935_CS = D3; // SPI CS
static constexpr uint8_t PIN_BUZZER = D6; // PN2222A base via resistor
static constexpr uint8_t PIN_RESET_BTN = D7; // INPUT_PULLUP, pressed = GND
static constexpr uint8_t PIN_SPI_SCK = D8; // SPI SCK
static constexpr uint8_t PIN_SPI_MISO = D9; // SPI MISO
static constexpr uint8_t PIN_SPI_MOSI = D10; // SPI MOSI
static constexpr uint8_t PIN_STATUS_LED = LED_BUILTIN; // onboard LED
static constexpr bool BUZZER_ACTIVE_HIGH = true;
static constexpr bool BUZZER_IS_PASSIVE = true;
enum FaultHex : uint16_t {
FAULT_NONE = 0x000,
FAULT_AS3935_INIT = 0x101,
FAULT_AS3935_CONFIG = 0x102,
FAULT_AS3935_IRQ_ATTACH = 0x103
};
SparkFun_AS3935 lightning;
volatile bool g_irq_flag = false;
volatile uint32_t g_irq_seen_ms = 0;
uint32_t g_last_heartbeat_ms = 0;
uint32_t g_buzzer_off_ms = 0;
uint32_t g_last_event_ms = 0;
uint32_t g_count_lightning = 0;
uint32_t g_count_noise = 0;
uint32_t g_count_disturber = 0;
bool g_latched_lightning = false;
FaultHex g_fault = FAULT_NONE;
bool g_prev_arm = false;
bool g_prev_mute = false;
bool g_prev_reset_pressed = false;
static inline bool armEnabled() {
return digitalRead(PIN_ARM_SW) == LOW;
}
static inline bool muteEnabled() {
return digitalRead(PIN_MUTE_SW) == LOW;
}
void startBuzzer(uint32_t duration_ms) {
if (BUZZER_IS_PASSIVE) {
tone(PIN_BUZZER, 2400);
} else {
digitalWrite(PIN_BUZZER, BUZZER_ACTIVE_HIGH ? HIGH : LOW);
}
g_buzzer_off_ms = millis() + duration_ms;
}
void updateBuzzer(uint32_t now_ms) {
if (g_buzzer_off_ms != 0 && (int32_t)(now_ms - g_buzzer_off_ms) >= 0) {
if (BUZZER_IS_PASSIVE) {
noTone(PIN_BUZZER);
} else {
digitalWrite(PIN_BUZZER, BUZZER_ACTIVE_HIGH ? LOW : HIGH);
}
g_buzzer_off_ms = 0;
}
}
void IRAM_ATTR onAs3935Irq() {
g_irq_flag = true;
g_irq_seen_ms = millis();
}
void faultHalt(FaultHex fault, const char* msg) {
g_fault = fault;
Serial.println();
Serial.println(F("FATAL FAULT"));
Serial.print(F("fault_hex=0x"));
Serial.println(static_cast<uint16_t>(fault), HEX);
Serial.println(msg);
while (true) {
digitalWrite(PIN_STATUS_LED, HIGH);
delay(120);
digitalWrite(PIN_STATUS_LED, LOW);
delay(280);
}
}
void printBanner() {
Serial.println();
Serial.println(F("=== Lightning Box M1 Bring-Up ==="));
Serial.println(F("Board: XIAO ESP32-C6"));
Serial.println(F("Mode: AS3935 SPI + IRQ"));
Serial.println(F("Fault code format: hex (0x...)"));
}
void startupBuzzerTest(bool muted_at_boot) {
if (muted_at_boot) {
Serial.println(F("buzzer_test=SKIPPED (mute switch ON at boot)"));
return;
}
Serial.println(F("buzzer_test=START"));
if (BUZZER_IS_PASSIVE) {
// Short audible tone sweep for passive piezo elements.
const uint16_t freq_hz[] = {1568, 1976, 2637, 3136};
for (size_t i = 0; i < 4; i++) {
tone(PIN_BUZZER, freq_hz[i], 140);
delay(170);
}
noTone(PIN_BUZZER);
} else {
// Pulse pattern for active buzzers.
const uint16_t on_ms[] = {120, 120, 180, 240};
const uint16_t off_ms[] = {80, 80, 100, 0};
for (size_t i = 0; i < 4; i++) {
digitalWrite(PIN_BUZZER, BUZZER_ACTIVE_HIGH ? HIGH : LOW);
delay(on_ms[i]);
digitalWrite(PIN_BUZZER, BUZZER_ACTIVE_HIGH ? LOW : HIGH);
if (off_ms[i] > 0) {
delay(off_ms[i]);
}
}
}
Serial.println(F("buzzer_test=PASS"));
}
void sensorConfigure(const SensorParams& p) {
lightning.setIndoorOutdoor(p.afe_mode);
lightning.tuneCap(SENSOR_TUNE_CAP_BITS * 8);
lightning.setNoiseLevel(p.noise_floor);
lightning.watchdogThreshold(p.watchdog);
lightning.spikeRejection(p.spike);
lightning.lightningThreshold(p.min_lightnings);
lightning.maskDisturber(false);
}
void setup() {
pinMode(PIN_STATUS_LED, OUTPUT);
pinMode(PIN_BUZZER, OUTPUT);
if (!BUZZER_IS_PASSIVE) {
digitalWrite(PIN_BUZZER, BUZZER_ACTIVE_HIGH ? LOW : HIGH);
}
pinMode(PIN_ARM_SW, INPUT_PULLUP);
pinMode(PIN_MUTE_SW, INPUT_PULLUP);
pinMode(PIN_RESET_BTN, INPUT_PULLUP);
pinMode(PIN_AS3935_IRQ, INPUT);
Serial.begin(115200);
delay(200);
printBanner();
g_prev_arm = armEnabled();
g_prev_mute = muteEnabled();
g_prev_reset_pressed = (digitalRead(PIN_RESET_BTN) == LOW);
Serial.printf("startup arm=%d mute=%d\n", g_prev_arm ? 1 : 0, g_prev_mute ? 1 : 0);
startupBuzzerTest(g_prev_mute);
SensorProfile profile = SENSOR_PROFILE_DEFAULT;
if (ENABLE_PROFILE_SELECT_SWITCH && g_prev_mute) {
profile = PROFILE_NOISY;
}
g_sensor = (profile == PROFILE_NOISY) ? PARAM_NOISY : PARAM_SENSITIVE;
Serial.printf("profile=%s (switch_select=%d)\n", g_sensor.name,
ENABLE_PROFILE_SELECT_SWITCH ? 1 : 0);
if (ENABLE_PROFILE_SELECT_SWITCH) {
Serial.println(F("profile_hint: set MUTE switch ON before boot to force NOISY profile"));
}
SPI.begin(PIN_SPI_SCK, PIN_SPI_MISO, PIN_SPI_MOSI, PIN_AS3935_CS);
if (!lightning.beginSPI(PIN_AS3935_CS, 2000000)) {
faultHalt(FAULT_AS3935_INIT, "AS3935 beginSPI failed");
}
sensorConfigure(g_sensor);
if (!lightning.calibrateOsc()) {
faultHalt(FAULT_AS3935_CONFIG, "AS3935 calibrateOsc failed");
}
Serial.printf(
"AS3935 cfg: profile=%s afe=%s tuneCap_bits=%u tuneCap_pf=%u noise=%u watchdog=%u spike=%u minLight=%u\n",
g_sensor.name, (g_sensor.afe_mode == INDOOR) ? "INDOOR" : "OUTDOOR",
SENSOR_TUNE_CAP_BITS, lightning.readTuneCap(), g_sensor.noise_floor,
g_sensor.watchdog, g_sensor.spike, g_sensor.min_lightnings);
const int irq_num = digitalPinToInterrupt(PIN_AS3935_IRQ);
if (irq_num == NOT_AN_INTERRUPT) {
faultHalt(FAULT_AS3935_IRQ_ATTACH, "Invalid IRQ pin for attachInterrupt");
}
attachInterrupt(irq_num, onAs3935Irq, RISING);
Serial.println(F("M1 init complete. Waiting for AS3935 events..."));
}
void handleAs3935Event(uint32_t now_ms) {
// AS3935 datasheet recommends waiting >=2ms after IRQ.
if (!g_irq_flag || (uint32_t)(now_ms - g_irq_seen_ms) < 2) {
return;
}
g_irq_flag = false;
const int intVal = lightning.readInterruptReg();
g_last_event_ms = now_ms;
if (intVal == NOISE_INT) {
g_count_noise++;
Serial.printf("[%lu] event=NOISE count=%lu\r\n", now_ms, g_count_noise);
} else if (intVal == DISTURBER_INT) {
g_count_disturber++;
Serial.printf("[%lu] event=DISTURBER count=%lu\r\n", now_ms, g_count_disturber);
} else if (intVal == LIGHTNING_INT) {
g_count_lightning++;
g_latched_lightning = true;
const byte distance = lightning.distanceToStorm();
const long energy = lightning.lightningEnergy();
Serial.printf(
"[%lu] event=LIGHTNING count=%lu distance_km=%u energy=%ld arm=%d mute=%d\r\n",
now_ms, g_count_lightning, distance, energy, armEnabled() ? 1 : 0,
muteEnabled() ? 1 : 0);
if (!muteEnabled()) {
startBuzzer(80);
}
} else {
// intVal can be 0 when only distance estimate changed.
Serial.printf("[%lu] event=OTHER int=0x%02X\r\n", now_ms, intVal);
}
}
void loop() {
const uint32_t now_ms = millis();
const bool arm_now = armEnabled();
const bool mute_now = muteEnabled();
const bool reset_pressed_now = (digitalRead(PIN_RESET_BTN) == LOW);
if (arm_now != g_prev_arm) {
g_prev_arm = arm_now;
Serial.printf("[%lu] switch=ARM state=%s\n", now_ms, arm_now ? "ON" : "OFF");
}
if (mute_now != g_prev_mute) {
g_prev_mute = mute_now;
Serial.printf("[%lu] switch=MUTE state=%s\n", now_ms, mute_now ? "ON" : "OFF");
}
if (reset_pressed_now != g_prev_reset_pressed) {
Serial.printf("[%lu] switch=RESET state=%s\n", now_ms,
reset_pressed_now ? "DOWN" : "UP");
// Act only on press edge.
if (reset_pressed_now) {
g_latched_lightning = false;
g_count_lightning = 0;
g_count_noise = 0;
g_count_disturber = 0;
Serial.printf("[%lu] action=RESET_ACK counters_cleared\r\n", now_ms);
if (!mute_now) {
startBuzzer(180); // manual buzzer path test
}
}
g_prev_reset_pressed = reset_pressed_now;
}
// Heartbeat LED: slow blink when armed, off when standby.
if ((uint32_t)(now_ms - g_last_heartbeat_ms) >= 500) {
g_last_heartbeat_ms = now_ms;
if (arm_now) {
digitalWrite(PIN_STATUS_LED, !digitalRead(PIN_STATUS_LED));
} else {
digitalWrite(PIN_STATUS_LED, LOW);
}
}
if (arm_now) {
handleAs3935Event(now_ms);
}
updateBuzzer(now_ms);
}M2: Operator UX, Debounce, and Hardware ChecksAccepted on hardware
M2 shifted from detection-only behavior to day-to-day usability: readable OLED state, stable control input handling, and a clearer event stream while keeping M1 reliability.
This milestone also confirmed key buzzer-path wiring and verified final bench behavior under both SENSITIVE and NOISY profiles.
- OLED event UX + ring buffer integrated.
- Debounce for ARM/MUTE/RESET paths verified.
- Buzzer/transistor path verified on hardware.
- M2 signed off as the stable base for connected features.
Open M2 Code: m2_core.ino
#include <Arduino.h>
#include <SPI.h>
#include <Wire.h>
#include <stdarg.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include "SparkFun_AS3935.h"
// AS3935 event bits
#define LIGHTNING_INT 0x08
#define DISTURBER_INT 0x04
#define NOISE_INT 0x01
#define INDOOR 0x12
#define OUTDOOR 0x0E
static constexpr const char* FW_REV = "M2_CORE_R3_2026-03-07";
// Display config (0.91" modules are commonly 128x32)
static constexpr int OLED_W = 128;
static constexpr int OLED_H_32 = 32;
static constexpr int OLED_H_64 = 64;
static constexpr uint8_t OLED_ADDR_A = 0x3C;
static constexpr uint8_t OLED_ADDR_B = 0x3D;
static constexpr uint8_t PIN_OLED_SDA = D4;
static constexpr uint8_t PIN_OLED_SCL = D5;
Adafruit_SSD1306 display32(OLED_W, OLED_H_32, &Wire, -1);
Adafruit_SSD1306 display64(OLED_W, OLED_H_64, &Wire, -1);
Adafruit_SSD1306* g_display = nullptr;
uint8_t g_oled_addr = 0x00;
uint8_t g_oled_h = 0;
// MOD-1016 factory calibration number (register 0x08 bits [3:0]).
static constexpr uint8_t SENSOR_TUNE_CAP_BITS = 7;
static constexpr bool ENABLE_PROFILE_SELECT_SWITCH = true; // MUTE ON at boot => NOISY
enum SensorProfile : uint8_t { PROFILE_SENSITIVE = 0, PROFILE_NOISY = 1 };
static constexpr SensorProfile SENSOR_PROFILE_DEFAULT = PROFILE_SENSITIVE;
struct SensorParams {
uint8_t afe_mode;
uint8_t noise_floor;
uint8_t watchdog;
uint8_t spike;
uint8_t min_lightnings;
const char* name;
};
const SensorParams PARAM_SENSITIVE = {INDOOR, 2, 1, 1, 1, "SENSITIVE"};
const SensorParams PARAM_NOISY = {OUTDOOR, 7, 6, 6, 1, "NOISY"};
SensorParams g_sensor = PARAM_SENSITIVE;
// Pin map (XIAO ESP32-C6)
static constexpr uint8_t PIN_ARM_SW = D0; // INPUT_PULLUP, ON = GND
static constexpr uint8_t PIN_MUTE_SW = D1; // INPUT_PULLUP, ON = GND
static constexpr uint8_t PIN_AS3935_IRQ = D2; // interrupt
static constexpr uint8_t PIN_AS3935_CS = D3; // SPI CS
static constexpr uint8_t PIN_BUZZER = D6; // PN2222A base via 1k
static constexpr uint8_t PIN_RESET_BTN = D7; // INPUT_PULLUP, pressed = GND
static constexpr uint8_t PIN_SPI_SCK = D8;
static constexpr uint8_t PIN_SPI_MISO = D9;
static constexpr uint8_t PIN_SPI_MOSI = D10;
static constexpr uint8_t PIN_STATUS_LED = LED_BUILTIN;
// Buzzer mode
static constexpr bool BUZZER_IS_PASSIVE = true;
static constexpr bool BUZZER_ACTIVE_HIGH = true;
enum FaultHex : uint16_t {
FAULT_NONE = 0x000,
FAULT_AS3935_INIT = 0x101,
FAULT_AS3935_CONFIG = 0x102,
FAULT_AS3935_IRQ_ATTACH = 0x103,
FAULT_OLED_INIT = 0x201
};
struct DebouncedInput {
uint8_t pin;
bool active_low;
bool stable_active;
bool last_raw_active;
uint32_t raw_changed_ms;
};
SparkFun_AS3935 lightning;
volatile bool g_irq_flag = false;
volatile uint32_t g_irq_seen_ms = 0;
DebouncedInput g_in_arm{PIN_ARM_SW, true, false, false, 0};
DebouncedInput g_in_mute{PIN_MUTE_SW, true, false, false, 0};
DebouncedInput g_in_reset{PIN_RESET_BTN, true, false, false, 0};
uint32_t g_last_heartbeat_ms = 0;
uint32_t g_last_oled_ms = 0;
uint32_t g_buzzer_off_ms = 0;
uint32_t g_last_event_ms = 0;
uint32_t g_boot_ms = 0;
uint32_t g_count_lightning = 0;
uint32_t g_count_noise = 0;
uint32_t g_count_disturber = 0;
uint8_t g_last_distance = 0;
uint32_t g_last_energy = 0;
char g_last_event_name[12] = "NONE";
uint32_t g_last_lightning_ms = 0;
static constexpr uint8_t EVENT_BUF_SIZE = 8;
static constexpr uint8_t EVENT_LINE_LEN = 24;
char g_event_buf[EVENT_BUF_SIZE][EVENT_LINE_LEN];
uint8_t g_event_head = 0; // next write slot
uint8_t g_event_count = 0; // number of valid entries
uint8_t g_oled_roll_offset = 0;
uint32_t g_last_oled_roll_ms = 0;
bool g_latched_lightning = false;
FaultHex g_fault = FAULT_NONE;
bool g_oled_ok = false;
Adafruit_SSD1306& oled() { return *g_display; }
bool i2cPing(uint8_t addr) {
Wire.beginTransmission(addr);
return Wire.endTransmission() == 0;
}
void pushEventLine(const char* fmt, ...) {
char line[EVENT_LINE_LEN];
va_list args;
va_start(args, fmt);
vsnprintf(line, sizeof(line), fmt, args);
va_end(args);
strncpy(g_event_buf[g_event_head], line, EVENT_LINE_LEN - 1);
g_event_buf[g_event_head][EVENT_LINE_LEN - 1] = '\0';
g_event_head = (g_event_head + 1) % EVENT_BUF_SIZE;
if (g_event_count < EVENT_BUF_SIZE) g_event_count++;
}
const char* getRecentEvent(uint8_t offset_from_newest) {
if (g_event_count == 0) return "none";
if (offset_from_newest >= g_event_count) offset_from_newest %= g_event_count;
int idx = static_cast<int>(g_event_head) - 1 - static_cast<int>(offset_from_newest);
while (idx < 0) idx += EVENT_BUF_SIZE;
return g_event_buf[idx];
}
bool readActive(const DebouncedInput& in) {
const bool level = digitalRead(in.pin);
return in.active_low ? (level == LOW) : (level == HIGH);
}
void initDebounce(DebouncedInput& in, uint32_t now_ms) {
in.last_raw_active = readActive(in);
in.stable_active = in.last_raw_active;
in.raw_changed_ms = now_ms;
}
bool updateDebounce(DebouncedInput& in, uint32_t now_ms, uint32_t debounce_ms) {
const bool raw = readActive(in);
if (raw != in.last_raw_active) {
in.last_raw_active = raw;
in.raw_changed_ms = now_ms;
}
if (in.stable_active != raw && (now_ms - in.raw_changed_ms) >= debounce_ms) {
in.stable_active = raw;
return true;
}
return false;
}
void buzzerOff() {
if (BUZZER_IS_PASSIVE) {
noTone(PIN_BUZZER);
} else {
digitalWrite(PIN_BUZZER, BUZZER_ACTIVE_HIGH ? LOW : HIGH);
}
}
void startBuzzer(uint32_t duration_ms, uint16_t freq_hz = 2400) {
if (BUZZER_IS_PASSIVE) {
tone(PIN_BUZZER, freq_hz);
} else {
digitalWrite(PIN_BUZZER, BUZZER_ACTIVE_HIGH ? HIGH : LOW);
}
g_buzzer_off_ms = millis() + duration_ms;
}
void updateBuzzer(uint32_t now_ms) {
if (g_buzzer_off_ms != 0 && (int32_t)(now_ms - g_buzzer_off_ms) >= 0) {
buzzerOff();
g_buzzer_off_ms = 0;
}
}
void IRAM_ATTR onAs3935Irq() {
g_irq_flag = true;
g_irq_seen_ms = millis();
}
void faultHalt(FaultHex fault, const char* msg) {
g_fault = fault;
Serial.println();
Serial.println(F("FATAL FAULT"));
Serial.print(F("fault_hex=0x"));
Serial.println(static_cast<uint16_t>(fault), HEX);
Serial.println(msg);
while (true) {
digitalWrite(PIN_STATUS_LED, HIGH);
delay(120);
digitalWrite(PIN_STATUS_LED, LOW);
delay(280);
}
}
void printBanner() {
Serial.println();
Serial.println(F("=== Lightning Box M2 Core ==="));
Serial.println(F("Board: XIAO ESP32-C6"));
Serial.println(F("Mode: AS3935 SPI + IRQ + OLED + Debounce"));
Serial.print(F("FW: "));
Serial.println(FW_REV);
Serial.println(F("Fault code format: hex (0x...)"));
}
void startupBuzzerTest(bool muted_at_boot) {
if (muted_at_boot) {
Serial.println(F("buzzer_test=SKIPPED (mute ON at boot)"));
return;
}
Serial.println(F("buzzer_test=START"));
const uint16_t freq_hz[] = {1568, 1976, 2637, 3136};
for (size_t i = 0; i < 4; i++) {
tone(PIN_BUZZER, freq_hz[i], 120);
delay(150);
}
noTone(PIN_BUZZER);
Serial.println(F("buzzer_test=PASS"));
}
void sensorConfigure(const SensorParams& p) {
lightning.setIndoorOutdoor(p.afe_mode);
lightning.tuneCap(SENSOR_TUNE_CAP_BITS * 8);
lightning.setNoiseLevel(p.noise_floor);
lightning.watchdogThreshold(p.watchdog);
lightning.spikeRejection(p.spike);
lightning.lightningThreshold(p.min_lightnings);
lightning.maskDisturber(false);
}
void i2cScan() {
uint8_t found = 0;
for (uint8_t addr = 1; addr < 127; addr++) {
if (i2cPing(addr)) {
Serial.printf("i2c_found=0x%02X\n", addr);
found++;
}
}
if (!found) {
Serial.println(F("i2c_found=NONE"));
}
}
bool tryOledInit(Adafruit_SSD1306& panel, uint8_t addr, uint8_t height) {
if (!panel.begin(SSD1306_SWITCHCAPVCC, addr)) return false;
if (!i2cPing(addr)) return false;
g_display = &panel;
g_oled_addr = addr;
g_oled_h = height;
return true;
}
void oledPanelFlash() {
if (!g_oled_ok) return;
oled().clearDisplay();
oled().fillRect(0, 0, OLED_W, g_oled_h, SSD1306_WHITE);
oled().display();
delay(120);
oled().clearDisplay();
oled().display();
}
void oledBoot(const char* line1, const char* line2) {
if (!g_oled_ok) return;
oled().clearDisplay();
oled().setTextSize(1);
oled().setTextColor(SSD1306_WHITE);
oled().setCursor(0, 0);
oled().println(F("Lightning M2"));
oled().println(line1);
if (line2 && line2[0]) oled().println(line2);
oled().display();
}
void oledLive(uint32_t now_ms) {
if (!g_oled_ok) return;
if ((now_ms - g_last_oled_roll_ms) >= 1200) {
g_last_oled_roll_ms = now_ms;
if (g_event_count > 0) {
g_oled_roll_offset = (g_oled_roll_offset + 1) % g_event_count;
} else {
g_oled_roll_offset = 0;
}
}
oled().clearDisplay();
oled().setTextSize(1);
oled().setTextColor(SSD1306_WHITE);
oled().setCursor(0, 0);
oled().printf("P:%c A:%d M:%d\n", (g_sensor.name[0] == 'N') ? 'N' : 'S',
g_in_arm.stable_active ? 1 : 0, g_in_mute.stable_active ? 1 : 0);
oled().printf("L:%lu D:%lu N:%lu\n", g_count_lightning, g_count_disturber, g_count_noise);
if (g_count_lightning > 0) {
oled().printf("LTG:%lus %uk e%lu\n", (now_ms - g_last_lightning_ms) / 1000UL, g_last_distance,
g_last_energy);
} else {
oled().println(F("LTG:none"));
}
oled().printf("EV:%s", getRecentEvent(g_oled_roll_offset));
oled().display();
}
void handleAs3935Event(uint32_t now_ms) {
if (!g_irq_flag || (uint32_t)(now_ms - g_irq_seen_ms) < 2) return;
g_irq_flag = false;
const int intVal = lightning.readInterruptReg();
g_last_event_ms = now_ms;
if (intVal == NOISE_INT) {
g_count_noise++;
strncpy(g_last_event_name, "NOISE", sizeof(g_last_event_name) - 1);
Serial.printf("[%lu] event=NOISE count=%lu\r\n", now_ms, g_count_noise);
pushEventLine("NOISE #%lu", g_count_noise);
} else if (intVal == DISTURBER_INT) {
g_count_disturber++;
strncpy(g_last_event_name, "DISTURBER", sizeof(g_last_event_name) - 1);
Serial.printf("[%lu] event=DISTURBER count=%lu\r\n", now_ms, g_count_disturber);
pushEventLine("DIST #%lu", g_count_disturber);
} else if (intVal == LIGHTNING_INT) {
g_count_lightning++;
g_latched_lightning = true;
g_last_distance = lightning.distanceToStorm();
g_last_energy = lightning.lightningEnergy();
g_last_lightning_ms = now_ms;
strncpy(g_last_event_name, "LIGHTNING", sizeof(g_last_event_name) - 1);
Serial.printf("[%lu] event=LIGHTNING count=%lu distance_km=%u energy=%lu arm=%d mute=%d\r\n",
now_ms, g_count_lightning, g_last_distance, g_last_energy,
g_in_arm.stable_active ? 1 : 0, g_in_mute.stable_active ? 1 : 0);
pushEventLine("LTG #%lu %uk", g_count_lightning, g_last_distance);
if (!g_in_mute.stable_active) startBuzzer(130, 2400);
} else {
strncpy(g_last_event_name, "OTHER", sizeof(g_last_event_name) - 1);
Serial.printf("[%lu] event=OTHER int=0x%02X\r\n", now_ms, intVal);
pushEventLine("OTHER 0x%02X", intVal);
}
}
void setup() {
pinMode(PIN_STATUS_LED, OUTPUT);
pinMode(PIN_BUZZER, OUTPUT);
buzzerOff();
pinMode(PIN_ARM_SW, INPUT_PULLUP);
pinMode(PIN_MUTE_SW, INPUT_PULLUP);
pinMode(PIN_RESET_BTN, INPUT_PULLUP);
pinMode(PIN_AS3935_IRQ, INPUT);
Serial.begin(115200);
const uint32_t serial_wait_start = millis();
while (!Serial && (millis() - serial_wait_start) < 2500) {
delay(10);
}
delay(120);
g_boot_ms = millis();
printBanner();
//Serial.flush();
Wire.begin(PIN_OLED_SDA, PIN_OLED_SCL);
Wire.setClock(100000);
delay(30);
Serial.printf("oled_i2c_pins sda=D4 scl=D5 (gpio=%u,%u)\n", PIN_OLED_SDA, PIN_OLED_SCL);
i2cScan();
const bool have_3c = i2cPing(OLED_ADDR_A);
const bool have_3d = i2cPing(OLED_ADDR_B);
if (!have_3c && !have_3d) {
Serial.println(F("warn: no OLED address responded on I2C (0x3C/0x3D)"));
g_oled_ok = false;
} else {
g_oled_ok = tryOledInit(display32, OLED_ADDR_A, OLED_H_32) ||
tryOledInit(display32, OLED_ADDR_B, OLED_H_32) ||
tryOledInit(display64, OLED_ADDR_A, OLED_H_64) ||
tryOledInit(display64, OLED_ADDR_B, OLED_H_64);
}
if (!g_oled_ok) {
Serial.println(F("warn: OLED init failed (tried 0x3C/0x3D, 128x32/128x64), continuing headless"));
} else {
Serial.printf("oled=ok addr=0x%02X size=128x%u\n", g_oled_addr, g_oled_h);
oledPanelFlash();
oledBoot("OLED init OK", "");
}
initDebounce(g_in_arm, millis());
initDebounce(g_in_mute, millis());
initDebounce(g_in_reset, millis());
Serial.printf("startup arm=%d mute=%d reset=%d\n", g_in_arm.stable_active ? 1 : 0,
g_in_mute.stable_active ? 1 : 0, g_in_reset.stable_active ? 1 : 0);
startupBuzzerTest(g_in_mute.stable_active);
SensorProfile profile = SENSOR_PROFILE_DEFAULT;
if (ENABLE_PROFILE_SELECT_SWITCH && g_in_mute.stable_active) profile = PROFILE_NOISY;
g_sensor = (profile == PROFILE_NOISY) ? PARAM_NOISY : PARAM_SENSITIVE;
Serial.printf("profile=%s (switch_select=%d)\n", g_sensor.name,
ENABLE_PROFILE_SELECT_SWITCH ? 1 : 0);
if (ENABLE_PROFILE_SELECT_SWITCH) {
Serial.println(F("profile_hint: set MUTE ON before boot to force NOISY"));
}
pushEventLine("BOOT %s", g_sensor.name);
SPI.begin(PIN_SPI_SCK, PIN_SPI_MISO, PIN_SPI_MOSI, PIN_AS3935_CS);
if (!lightning.beginSPI(PIN_AS3935_CS, 2000000)) {
faultHalt(FAULT_AS3935_INIT, "AS3935 beginSPI failed");
}
sensorConfigure(g_sensor);
if (!lightning.calibrateOsc()) {
faultHalt(FAULT_AS3935_CONFIG, "AS3935 calibrateOsc failed");
}
Serial.printf(
"AS3935 cfg: profile=%s afe=%s tuneCap_bits=%u tuneCap_pf=%u noise=%u watchdog=%u spike=%u minLight=%u\n",
g_sensor.name, (g_sensor.afe_mode == INDOOR) ? "INDOOR" : "OUTDOOR",
SENSOR_TUNE_CAP_BITS, lightning.readTuneCap(), g_sensor.noise_floor,
g_sensor.watchdog, g_sensor.spike, g_sensor.min_lightnings);
const int irq_num = digitalPinToInterrupt(PIN_AS3935_IRQ);
if (irq_num == NOT_AN_INTERRUPT) {
faultHalt(FAULT_AS3935_IRQ_ATTACH, "Invalid IRQ pin for attachInterrupt");
}
attachInterrupt(irq_num, onAs3935Irq, RISING);
Serial.println(F("M2 init complete. Waiting for events..."));
oledBoot("M2 init complete", "Waiting for events");
pushEventLine("M2 READY");
delay(400);
}
void loop() {
const uint32_t now_ms = millis();
const uint32_t debounce_ms = 25;
if (updateDebounce(g_in_arm, now_ms, debounce_ms)) {
Serial.printf("[%lu] switch=ARM state=%s\n", now_ms, g_in_arm.stable_active ? "ON" : "OFF");
pushEventLine("ARM %s", g_in_arm.stable_active ? "ON" : "OFF");
}
if (updateDebounce(g_in_mute, now_ms, debounce_ms)) {
Serial.printf("[%lu] switch=MUTE state=%s\n", now_ms, g_in_mute.stable_active ? "ON" : "OFF");
pushEventLine("MUTE %s", g_in_mute.stable_active ? "ON" : "OFF");
}
if (updateDebounce(g_in_reset, now_ms, debounce_ms)) {
Serial.printf("[%lu] switch=RESET state=%s\n", now_ms,
g_in_reset.stable_active ? "DOWN" : "UP");
pushEventLine("RESET %s", g_in_reset.stable_active ? "DN" : "UP");
if (g_in_reset.stable_active) {
g_latched_lightning = false;
g_count_lightning = 0;
g_count_noise = 0;
g_count_disturber = 0;
strncpy(g_last_event_name, "RESET", sizeof(g_last_event_name) - 1);
g_last_lightning_ms = 0;
Serial.printf("[%lu] action=RESET_ACK counters_cleared\r\n", now_ms);
pushEventLine("COUNTERS CLR");
if (!g_in_mute.stable_active) startBuzzer(180, 2200);
}
}
if ((now_ms - g_last_heartbeat_ms) >= 500) {
g_last_heartbeat_ms = now_ms;
if (g_in_arm.stable_active) {
digitalWrite(PIN_STATUS_LED, !digitalRead(PIN_STATUS_LED));
} else {
digitalWrite(PIN_STATUS_LED, LOW);
}
}
if (g_in_arm.stable_active) {
handleAs3935Event(now_ms);
}
updateBuzzer(now_ms);
if ((now_ms - g_last_oled_ms) >= 180) {
g_last_oled_ms = now_ms;
oledLive(now_ms);
}
}M3: Connected Features (In Progress)Active development
M3 extends the accepted M2 local behaviour into a connected node with NTP time sync, persistent strike logging, and a small HTTP surface for status/history access.
The key design constraint for M3 is to add network/storage features without regressing the core local warning behaviour.
- Wi-Fi STA + NTP sync path added.
- NVS ring buffer for strike history added.
/,/api/status, and/api/strikesendpoints added.- Credentials in this public block are placeholder values.
Open M3 Code: m3_connected.ino
#include <Arduino.h>
#include <SPI.h>
#include <Wire.h>
#include <stdarg.h>
#include <WiFi.h>
#include <WebServer.h>
#include <Preferences.h>
#include <time.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include "SparkFun_AS3935.h"
// AS3935 event bits
#define LIGHTNING_INT 0x08
#define DISTURBER_INT 0x04
#define NOISE_INT 0x01
#define INDOOR 0x12
#define OUTDOOR 0x0E
static constexpr const char* FW_REV = "M3_CONNECTED_R2_2026-03-08";
// Display config (0.91" modules are commonly 128x32)
static constexpr int OLED_W = 128;
static constexpr int OLED_H_32 = 32;
static constexpr int OLED_H_64 = 64;
static constexpr uint8_t OLED_ADDR_A = 0x3C;
static constexpr uint8_t OLED_ADDR_B = 0x3D;
static constexpr uint8_t PIN_OLED_SDA = D4;
static constexpr uint8_t PIN_OLED_SCL = D5;
Adafruit_SSD1306 display32(OLED_W, OLED_H_32, &Wire, -1);
Adafruit_SSD1306 display64(OLED_W, OLED_H_64, &Wire, -1);
Adafruit_SSD1306* g_display = nullptr;
uint8_t g_oled_addr = 0x00;
uint8_t g_oled_h = 0;
// MOD-1016 factory calibration number (register 0x08 bits [3:0]).
static constexpr uint8_t SENSOR_TUNE_CAP_BITS = 7;
static constexpr bool ENABLE_PROFILE_SELECT_SWITCH = true; // MUTE ON at boot => NOISY
enum SensorProfile : uint8_t { PROFILE_SENSITIVE = 0, PROFILE_NOISY = 1 };
static constexpr SensorProfile SENSOR_PROFILE_DEFAULT = PROFILE_SENSITIVE;
struct SensorParams {
uint8_t afe_mode;
uint8_t noise_floor;
uint8_t watchdog;
uint8_t spike;
uint8_t min_lightnings;
const char* name;
};
const SensorParams PARAM_SENSITIVE = {INDOOR, 2, 1, 1, 1, "SENSITIVE"};
const SensorParams PARAM_NOISY = {OUTDOOR, 7, 6, 6, 1, "NOISY"};
SensorParams g_sensor = PARAM_SENSITIVE;
// Pin map (XIAO ESP32-C6)
static constexpr uint8_t PIN_ARM_SW = D0; // INPUT_PULLUP, ON = GND
static constexpr uint8_t PIN_MUTE_SW = D1; // INPUT_PULLUP, ON = GND
static constexpr uint8_t PIN_AS3935_IRQ = D2; // interrupt
static constexpr uint8_t PIN_AS3935_CS = D3; // SPI CS
static constexpr uint8_t PIN_BUZZER = D6; // PN2222A base via 1k
static constexpr uint8_t PIN_RESET_BTN = D7; // INPUT_PULLUP, pressed = GND
static constexpr uint8_t PIN_SPI_SCK = D8;
static constexpr uint8_t PIN_SPI_MISO = D9;
static constexpr uint8_t PIN_SPI_MOSI = D10;
static constexpr uint8_t PIN_STATUS_LED = LED_BUILTIN;
// Buzzer mode
static constexpr bool BUZZER_IS_PASSIVE = true;
static constexpr bool BUZZER_ACTIVE_HIGH = true;
enum FaultHex : uint16_t {
FAULT_NONE = 0x000,
FAULT_AS3935_INIT = 0x101,
FAULT_AS3935_CONFIG = 0x102,
FAULT_AS3935_IRQ_ATTACH = 0x103,
FAULT_OLED_INIT = 0x201,
FAULT_STORE_LOAD = 0x301,
FAULT_STORE_SAVE = 0x302
};
struct DebouncedInput {
uint8_t pin;
bool active_low;
bool stable_active;
bool last_raw_active;
uint32_t raw_changed_ms;
};
SparkFun_AS3935 lightning;
WebServer web(80);
Preferences prefs;
volatile bool g_irq_flag = false;
volatile uint32_t g_irq_seen_ms = 0;
DebouncedInput g_in_arm{PIN_ARM_SW, true, false, false, 0};
DebouncedInput g_in_mute{PIN_MUTE_SW, true, false, false, 0};
DebouncedInput g_in_reset{PIN_RESET_BTN, true, false, false, 0};
uint32_t g_last_heartbeat_ms = 0;
uint32_t g_last_oled_ms = 0;
uint32_t g_buzzer_off_ms = 0;
uint32_t g_last_event_ms = 0;
uint32_t g_boot_ms = 0;
uint32_t g_count_lightning = 0;
uint32_t g_count_noise = 0;
uint32_t g_count_disturber = 0;
uint8_t g_last_distance = 0;
uint32_t g_last_energy = 0;
char g_last_event_name[12] = "NONE";
uint32_t g_last_lightning_ms = 0;
static constexpr uint8_t EVENT_BUF_SIZE = 8;
static constexpr uint8_t EVENT_LINE_LEN = 24;
static constexpr uint32_t RESET_LONG_PRESS_MS = 1500;
static constexpr uint32_t BOOT_PROFILE_ASSIST_MS = 15000;
static constexpr uint32_t STARTUP_STABILIZE_MS = 30000;
static constexpr uint32_t PROFILE_SWITCH_QUIET_MS = 2500;
static constexpr uint8_t BOOT_TERM_BUF_SIZE = 10;
static constexpr uint8_t BOOT_TERM_LINE_LEN = 22;
static constexpr uint32_t BOOT_TERM_TYPE_MS = 22;
char g_event_buf[EVENT_BUF_SIZE][EVENT_LINE_LEN];
uint8_t g_event_head = 0; // next write slot
uint8_t g_event_count = 0; // number of valid entries
uint8_t g_oled_roll_offset = 0;
uint32_t g_last_oled_roll_ms = 0;
uint32_t g_last_wifi_retry_ms = 0;
bool g_wifi_ok = false;
bool g_time_synced = false;
// --- M3 config ---
static constexpr const char* WIFI_SSID = "YOUR_SSID_HERE";
static constexpr const char* WIFI_PASS = "YOUR_PASSWORD_HERE";
static constexpr const char* NTP_SERVER_1 = "pool.ntp.org";
static constexpr const char* NTP_SERVER_2 = "time.nist.gov";
static constexpr long TZ_OFFSET_SEC = 0;
static constexpr int DST_OFFSET_SEC = 0;
// NVS strike history ring
static constexpr uint16_t STRIKE_MAX = 128;
struct StrikeRecord {
uint32_t epoch_s;
uint16_t distance_km;
uint32_t energy;
};
StrikeRecord g_strikes[STRIKE_MAX];
uint16_t g_strike_head = 0; // next write slot
uint16_t g_strike_count = 0; // valid record count
bool g_latched_lightning = false;
FaultHex g_fault = FAULT_NONE;
bool g_oled_ok = false;
bool g_reset_press_active = false;
bool g_reset_long_handled = false;
uint32_t g_reset_press_start_ms = 0;
bool g_boot_profile_assist_done = false;
bool g_irq_attached = false;
bool g_event_logging_enabled = false;
uint32_t g_profile_quiet_until_ms = 0;
char g_boot_term[BOOT_TERM_BUF_SIZE][BOOT_TERM_LINE_LEN];
uint8_t g_boot_term_head = 0;
uint8_t g_boot_term_count = 0;
uint8_t g_boot_term_reveal = 0;
uint32_t g_boot_term_last_ms = 0;
bool g_boot_term_anim = false;
Adafruit_SSD1306& oled() { return *g_display; }
bool i2cPing(uint8_t addr) {
Wire.beginTransmission(addr);
return Wire.endTransmission() == 0;
}
void pushEventLine(const char* fmt, ...) {
char line[EVENT_LINE_LEN];
va_list args;
va_start(args, fmt);
vsnprintf(line, sizeof(line), fmt, args);
va_end(args);
strncpy(g_event_buf[g_event_head], line, EVENT_LINE_LEN - 1);
g_event_buf[g_event_head][EVENT_LINE_LEN - 1] = '\0';
g_event_head = (g_event_head + 1) % EVENT_BUF_SIZE;
if (g_event_count < EVENT_BUF_SIZE) g_event_count++;
}
const char* getRecentEvent(uint8_t offset_from_newest) {
if (g_event_count == 0) return "none";
if (offset_from_newest >= g_event_count) offset_from_newest %= g_event_count;
int idx = static_cast<int>(g_event_head) - 1 - static_cast<int>(offset_from_newest);
while (idx < 0) idx += EVENT_BUF_SIZE;
return g_event_buf[idx];
}
bool isSwitchEventLine(const char* s) {
return (strncmp(s, "MUTE ", 5) == 0) || (strncmp(s, "ARM ", 4) == 0) ||
(strncmp(s, "RESET ", 6) == 0);
}
const char* getRecentDisplayEvent(uint8_t offset_from_newest) {
if (g_event_count == 0) return "none";
uint8_t matched = 0;
for (uint8_t i = 0; i < g_event_count; i++) {
const char* s = getRecentEvent(i);
if (!isSwitchEventLine(s)) {
if (matched == offset_from_newest) return s;
matched++;
}
}
return getRecentEvent(0);
}
void bootTermAdd(const char* fmt, ...) {
char line[BOOT_TERM_LINE_LEN];
va_list args;
va_start(args, fmt);
vsnprintf(line, sizeof(line), fmt, args);
va_end(args);
strncpy(g_boot_term[g_boot_term_head], line, BOOT_TERM_LINE_LEN - 1);
g_boot_term[g_boot_term_head][BOOT_TERM_LINE_LEN - 1] = '\0';
g_boot_term_head = (g_boot_term_head + 1) % BOOT_TERM_BUF_SIZE;
if (g_boot_term_count < BOOT_TERM_BUF_SIZE) g_boot_term_count++;
g_boot_term_reveal = 0;
g_boot_term_last_ms = millis();
g_boot_term_anim = true;
}
const char* getBootTermRecent(uint8_t offset_from_newest) {
if (g_boot_term_count == 0) return "";
if (offset_from_newest >= g_boot_term_count) return "";
int idx = static_cast<int>(g_boot_term_head) - 1 - static_cast<int>(offset_from_newest);
while (idx < 0) idx += BOOT_TERM_BUF_SIZE;
return g_boot_term[idx];
}
bool readActive(const DebouncedInput& in) {
const bool level = digitalRead(in.pin);
return in.active_low ? (level == LOW) : (level == HIGH);
}
void initDebounce(DebouncedInput& in, uint32_t now_ms) {
in.last_raw_active = readActive(in);
in.stable_active = in.last_raw_active;
in.raw_changed_ms = now_ms;
}
bool updateDebounce(DebouncedInput& in, uint32_t now_ms, uint32_t debounce_ms) {
const bool raw = readActive(in);
if (raw != in.last_raw_active) {
in.last_raw_active = raw;
in.raw_changed_ms = now_ms;
}
if (in.stable_active != raw && (now_ms - in.raw_changed_ms) >= debounce_ms) {
in.stable_active = raw;
return true;
}
return false;
}
void buzzerOff() {
if (BUZZER_IS_PASSIVE) {
noTone(PIN_BUZZER);
} else {
digitalWrite(PIN_BUZZER, BUZZER_ACTIVE_HIGH ? LOW : HIGH);
}
}
void startBuzzer(uint32_t duration_ms, uint16_t freq_hz = 2400) {
if (BUZZER_IS_PASSIVE) {
tone(PIN_BUZZER, freq_hz);
} else {
digitalWrite(PIN_BUZZER, BUZZER_ACTIVE_HIGH ? HIGH : LOW);
}
g_buzzer_off_ms = millis() + duration_ms;
}
void updateBuzzer(uint32_t now_ms) {
if (g_buzzer_off_ms != 0 && (int32_t)(now_ms - g_buzzer_off_ms) >= 0) {
buzzerOff();
g_buzzer_off_ms = 0;
}
}
void IRAM_ATTR onAs3935Irq() {
g_irq_flag = true;
g_irq_seen_ms = millis();
}
void faultHalt(FaultHex fault, const char* msg) {
g_fault = fault;
Serial.println();
Serial.println(F("FATAL FAULT"));
Serial.print(F("fault_hex=0x"));
Serial.println(static_cast<uint16_t>(fault), HEX);
Serial.println(msg);
while (true) {
digitalWrite(PIN_STATUS_LED, HIGH);
delay(120);
digitalWrite(PIN_STATUS_LED, LOW);
delay(280);
}
}
void printBanner() {
Serial.println();
Serial.println(F("=== Lightning Box M3 Connected ==="));
Serial.println(F("Board: XIAO ESP32-C6"));
Serial.println(F("Mode: AS3935 + OLED + WiFi/NTP + Flash Log + Web"));
Serial.print(F("FW: "));
Serial.println(FW_REV);
Serial.println(F("Fault code format: hex (0x...)"));
}
void formatIsoTime(uint32_t epoch_s, char* out, size_t out_len) {
if (epoch_s == 0) {
snprintf(out, out_len, "unsynced");
return;
}
time_t t = static_cast<time_t>(epoch_s);
struct tm tmv;
gmtime_r(&t, &tmv);
strftime(out, out_len, "%Y-%m-%dT%H:%M:%SZ", &tmv);
}
void addStrikeRecord(uint32_t epoch_s, uint16_t distance_km, uint32_t energy) {
g_strikes[g_strike_head] = {epoch_s, distance_km, energy};
g_strike_head = (g_strike_head + 1) % STRIKE_MAX;
if (g_strike_count < STRIKE_MAX) g_strike_count++;
}
bool saveStrikeStore() {
if (!prefs.begin("m3log", false)) return false;
bool ok = true;
ok &= prefs.putUShort("head", g_strike_head) == sizeof(g_strike_head);
ok &= prefs.putUShort("count", g_strike_count) == sizeof(g_strike_count);
ok &= prefs.putBytes("records", g_strikes, sizeof(g_strikes)) == sizeof(g_strikes);
prefs.end();
return ok;
}
bool loadStrikeStore() {
if (!prefs.begin("m3log", true)) return false;
const uint16_t head = prefs.getUShort("head", 0);
const uint16_t count = prefs.getUShort("count", 0);
const size_t got = prefs.getBytes("records", g_strikes, sizeof(g_strikes));
prefs.end();
if (head >= STRIKE_MAX || count > STRIKE_MAX) return false;
if (got != sizeof(g_strikes) && got != 0) return false;
g_strike_head = head;
g_strike_count = count;
if (got == 0) {
memset(g_strikes, 0, sizeof(g_strikes));
g_strike_head = 0;
g_strike_count = 0;
}
return true;
}
bool maybeSyncTime(uint32_t timeout_ms) {
if (WiFi.status() != WL_CONNECTED) return false;
configTime(TZ_OFFSET_SEC, DST_OFFSET_SEC, NTP_SERVER_1, NTP_SERVER_2);
bootTermAdd("NTP %s", NTP_SERVER_1);
const uint32_t start = millis();
while ((millis() - start) < timeout_ms) {
time_t now = time(nullptr);
if (now > 1700000000) { // sanity threshold
g_time_synced = true;
char ts[32];
formatIsoTime(static_cast<uint32_t>(now), ts, sizeof(ts));
bootTermAdd("TIME OK %.20s", ts);
return true;
}
delay(100);
}
bootTermAdd("TIME FAIL");
return false;
}
void handleRoot() {
String html;
html.reserve(2200);
html += F("<!doctype html><html><head><meta charset='utf-8'><meta name='viewport' content='width=device-width,initial-scale=1'>");
html += F("<title>Lightning Box M3</title><style>body{font-family:ui-monospace,monospace;background:#0f172a;color:#e2e8f0;padding:16px}table{border-collapse:collapse;width:100%}td,th{border:1px solid #334155;padding:6px;text-align:left}a{color:#7dd3fc}</style></head><body>");
html += F("<h2>Lightning Box M3</h2>");
html += F("<p><a href='/api/status'>/api/status</a> | <a href='/api/strikes'>/api/strikes</a></p>");
html += F("<table><tr><th>#</th><th>Time (UTC)</th><th>Dist (km)</th><th>Energy</th></tr>");
for (uint16_t i = 0; i < g_strike_count; i++) {
int idx = static_cast<int>(g_strike_head) - 1 - static_cast<int>(i);
while (idx < 0) idx += STRIKE_MAX;
char ts[32];
formatIsoTime(g_strikes[idx].epoch_s, ts, sizeof(ts));
html += "<tr><td>" + String(i + 1) + "</td><td>" + String(ts) + "</td><td>" +
String(g_strikes[idx].distance_km) + "</td><td>" + String(g_strikes[idx].energy) + "</td></tr>";
}
html += F("</table></body></html>");
web.send(200, "text/html", html);
}
void handleStatusApi() {
char now_iso[32];
time_t now_epoch = time(nullptr);
formatIsoTime(now_epoch > 1700000000 ? static_cast<uint32_t>(now_epoch) : 0, now_iso, sizeof(now_iso));
String json;
json.reserve(512);
json += "{";
json += "\"fw\":\"" + String(FW_REV) + "\",";
json += "\"profile\":\"" + String(g_sensor.name) + "\",";
json += "\"wifi\":" + String(g_wifi_ok ? "true" : "false") + ",";
json += "\"time_synced\":" + String(g_time_synced ? "true" : "false") + ",";
json += "\"now_utc\":\"" + String(now_iso) + "\",";
json += "\"counts\":{\"lightning\":" + String(g_count_lightning) + ",\"disturber\":" +
String(g_count_disturber) + ",\"noise\":" + String(g_count_noise) + "},";
json += "\"strike_log_count\":" + String(g_strike_count);
json += "}";
web.send(200, "application/json", json);
}
void handleStrikesApi() {
String json;
json.reserve(2400);
json += "{\"count\":";
json += String(g_strike_count);
json += ",\"items\":[";
for (uint16_t i = 0; i < g_strike_count; i++) {
int idx = static_cast<int>(g_strike_head) - 1 - static_cast<int>(i);
while (idx < 0) idx += STRIKE_MAX;
char ts[32];
formatIsoTime(g_strikes[idx].epoch_s, ts, sizeof(ts));
if (i) json += ",";
json += "{\"n\":";
json += String(i + 1);
json += ",\"epoch\":";
json += String(g_strikes[idx].epoch_s);
json += ",\"utc\":\"";
json += String(ts);
json += "\",\"distance_km\":";
json += String(g_strikes[idx].distance_km);
json += ",\"energy\":";
json += String(g_strikes[idx].energy);
json += "}";
}
json += "]}";
web.send(200, "application/json", json);
}
void setupWebServer() {
web.on("/", HTTP_GET, handleRoot);
web.on("/api/status", HTTP_GET, handleStatusApi);
web.on("/api/strikes", HTTP_GET, handleStrikesApi);
web.begin();
}
void setupWiFiAndTime() {
if (strlen(WIFI_SSID) == 0) {
Serial.println(F("wifi=SKIPPED (WIFI_SSID empty)"));
bootTermAdd("WIFI OFFLINE");
return;
}
WiFi.mode(WIFI_STA);
WiFi.begin(WIFI_SSID, WIFI_PASS);
Serial.print(F("wifi=CONNECTING ssid="));
Serial.println(WIFI_SSID);
bootTermAdd("WIFI %s", WIFI_SSID);
const uint32_t start = millis();
while (WiFi.status() != WL_CONNECTED && (millis() - start) < 12000) {
delay(200);
}
if (WiFi.status() == WL_CONNECTED) {
g_wifi_ok = true;
Serial.print(F("wifi=OK ip="));
Serial.println(WiFi.localIP());
bootTermAdd("IP %s", WiFi.localIP().toString().c_str());
if (maybeSyncTime(6000)) {
Serial.println(F("time_sync=OK"));
} else {
Serial.println(F("time_sync=FAIL"));
}
} else {
Serial.println(F("wifi=FAIL"));
bootTermAdd("WIFI FAIL");
}
}
void updateWiFiAndTimeRetry(uint32_t now_ms) {
if (strlen(WIFI_SSID) == 0) return;
if (g_wifi_ok && g_time_synced) return;
if ((now_ms - g_last_wifi_retry_ms) < 15000) return;
g_last_wifi_retry_ms = now_ms;
if (WiFi.status() != WL_CONNECTED) {
WiFi.disconnect();
WiFi.begin(WIFI_SSID, WIFI_PASS);
Serial.println(F("wifi=RETRY"));
bootTermAdd("WIFI RETRY");
return;
}
g_wifi_ok = true;
if (!g_time_synced && maybeSyncTime(2000)) {
Serial.println(F("time_sync=OK (retry)"));
}
}
void startupBuzzerTest(bool muted_at_boot) {
if (muted_at_boot) {
Serial.println(F("buzzer_test=SKIPPED (mute ON at boot)"));
return;
}
Serial.println(F("buzzer_test=START"));
const uint16_t freq_hz[] = {1568, 1976, 2637, 3136};
for (size_t i = 0; i < 4; i++) {
tone(PIN_BUZZER, freq_hz[i], 120);
delay(150);
}
noTone(PIN_BUZZER);
Serial.println(F("buzzer_test=PASS"));
}
void sensorConfigure(const SensorParams& p) {
lightning.setIndoorOutdoor(p.afe_mode);
lightning.tuneCap(SENSOR_TUNE_CAP_BITS * 8);
lightning.setNoiseLevel(p.noise_floor);
lightning.watchdogThreshold(p.watchdog);
lightning.spikeRejection(p.spike);
lightning.lightningThreshold(p.min_lightnings);
lightning.maskDisturber(false);
}
uint8_t profileCode() { return (g_sensor.name[0] == 'N') ? 1 : 0; }
void applyProfileRuntime(SensorProfile profile, bool runtime_switch) {
g_sensor = (profile == PROFILE_NOISY) ? PARAM_NOISY : PARAM_SENSITIVE;
sensorConfigure(g_sensor);
// Clear pending IRQ state and hold event processing briefly to avoid transients
// during/after profile register writes.
(void)lightning.readInterruptReg();
g_irq_flag = false;
g_profile_quiet_until_ms = millis() + PROFILE_SWITCH_QUIET_MS;
Serial.printf("[%lu] profile=%s (runtime_switch=%d)\n", millis(), g_sensor.name, runtime_switch ? 1 : 0);
pushEventLine("PROFILE %s", g_sensor.name[0] == 'N' ? "NOISY" : "SENS");
}
void maybeApplyBootProfileAssist(uint32_t now_ms) {
if (g_boot_profile_assist_done) return;
if ((now_ms - g_boot_ms) > BOOT_PROFILE_ASSIST_MS) {
g_boot_profile_assist_done = true;
return;
}
// If MUTE becomes active shortly after boot, honor NOISY profile intent.
if (g_in_mute.stable_active && profileCode() == 0) {
applyProfileRuntime(PROFILE_NOISY, true);
Serial.printf("[%lu] action=BOOT_PROFILE_ASSIST mute=ON window_ms=%lu\n", now_ms,
static_cast<unsigned long>(BOOT_PROFILE_ASSIST_MS));
g_boot_profile_assist_done = true;
}
}
void maybeEnableAs3935Events(uint32_t now_ms) {
if (g_event_logging_enabled) return;
if ((now_ms - g_boot_ms) < STARTUP_STABILIZE_MS) return;
if (!g_irq_attached) {
const int irq_num = digitalPinToInterrupt(PIN_AS3935_IRQ);
if (irq_num == NOT_AN_INTERRUPT) {
faultHalt(FAULT_AS3935_IRQ_ATTACH, "Invalid IRQ pin for attachInterrupt");
}
attachInterrupt(irq_num, onAs3935Irq, RISING);
g_irq_attached = true;
}
// Clear any stale pending IRQ status before opening event logging.
(void)lightning.readInterruptReg();
g_irq_flag = false;
g_event_logging_enabled = true;
Serial.printf("[%lu] startup_guard=END events_enabled=1 stabilize_ms=%lu\n", now_ms,
static_cast<unsigned long>(STARTUP_STABILIZE_MS));
pushEventLine("EVENTS ENABLED");
bootTermAdd("EVENTS ENABLED");
}
void i2cScan() {
uint8_t found = 0;
for (uint8_t addr = 1; addr < 127; addr++) {
if (i2cPing(addr)) {
Serial.printf("i2c_found=0x%02X\n", addr);
found++;
}
}
if (!found) {
Serial.println(F("i2c_found=NONE"));
}
}
bool tryOledInit(Adafruit_SSD1306& panel, uint8_t addr, uint8_t height) {
if (!panel.begin(SSD1306_SWITCHCAPVCC, addr)) return false;
if (!i2cPing(addr)) return false;
g_display = &panel;
g_oled_addr = addr;
g_oled_h = height;
return true;
}
void oledPanelFlash() {
if (!g_oled_ok) return;
oled().clearDisplay();
oled().fillRect(0, 0, OLED_W, g_oled_h, SSD1306_WHITE);
oled().display();
delay(120);
oled().clearDisplay();
oled().display();
}
void oledBoot(const char* line1, const char* line2) {
if (!g_oled_ok) return;
oled().clearDisplay();
oled().setTextSize(1);
oled().setTextColor(SSD1306_WHITE);
oled().setCursor(0, 0);
oled().println(F("Lightning M3"));
oled().println(line1);
if (line2 && line2[0]) oled().println(line2);
oled().display();
}
void oledLive(uint32_t now_ms) {
if (!g_oled_ok) return;
if ((now_ms - g_last_oled_roll_ms) >= 1200) {
g_last_oled_roll_ms = now_ms;
if (g_event_count > 0) {
g_oled_roll_offset = (g_oled_roll_offset + 1) % g_event_count;
} else {
g_oled_roll_offset = 0;
}
}
oled().clearDisplay();
oled().setTextSize(1);
oled().setTextColor(SSD1306_WHITE);
oled().setCursor(0, 0);
oled().printf("P:%d A:%d M:%d W:%d\n", profileCode(),
g_in_arm.stable_active ? 1 : 0, g_in_mute.stable_active ? 1 : 0, g_wifi_ok ? 1 : 0);
oled().printf("L:%lu D:%lu N:%lu\n", g_count_lightning, g_count_disturber, g_count_noise);
if (g_count_lightning > 0) {
oled().printf("LTG:%lus %uk e%lu\n", (now_ms - g_last_lightning_ms) / 1000UL, g_last_distance,
g_last_energy);
} else {
oled().println(F("LTG:none"));
}
oled().printf("EV:%s", getRecentDisplayEvent(g_oled_roll_offset));
oled().display();
}
void oledBootDiag(uint32_t now_ms) {
if (!g_oled_ok) return;
const uint32_t elapsed = now_ms - g_boot_ms;
const uint32_t remain = (elapsed >= STARTUP_STABILIZE_MS) ? 0 : (STARTUP_STABILIZE_MS - elapsed);
if (g_boot_term_anim && (now_ms - g_boot_term_last_ms) >= BOOT_TERM_TYPE_MS) {
g_boot_term_last_ms = now_ms;
const char* newest = getBootTermRecent(0);
const uint8_t newest_len = static_cast<uint8_t>(strlen(newest));
if (g_boot_term_reveal < newest_len) {
g_boot_term_reveal++;
} else {
g_boot_term_anim = false;
}
}
char l1[BOOT_TERM_LINE_LEN];
char l2[BOOT_TERM_LINE_LEN];
char l3[BOOT_TERM_LINE_LEN];
strncpy(l1, getBootTermRecent(2), sizeof(l1) - 1);
l1[sizeof(l1) - 1] = '\0';
strncpy(l2, getBootTermRecent(1), sizeof(l2) - 1);
l2[sizeof(l2) - 1] = '\0';
strncpy(l3, getBootTermRecent(0), sizeof(l3) - 1);
l3[sizeof(l3) - 1] = '\0';
if (g_boot_term_anim) {
const uint8_t n = (g_boot_term_reveal < strlen(l3)) ? g_boot_term_reveal : strlen(l3);
l3[n] = '\0';
}
oled().clearDisplay();
oled().setTextSize(1);
oled().setTextColor(SSD1306_WHITE);
oled().setCursor(0, 0);
oled().printf("G:%lus P:%d\n", remain / 1000UL, profileCode());
oled().println(l1);
oled().println(l2);
oled().print(l3);
if (g_boot_term_anim && ((now_ms / 250UL) % 2UL == 0UL)) oled().print("_");
oled().display();
}
void handleAs3935Event(uint32_t now_ms) {
if (!g_irq_flag || (uint32_t)(now_ms - g_irq_seen_ms) < 2) return;
g_irq_flag = false;
const int intVal = lightning.readInterruptReg();
g_last_event_ms = now_ms;
if (intVal == NOISE_INT) {
g_count_noise++;
strncpy(g_last_event_name, "NOISE", sizeof(g_last_event_name) - 1);
Serial.printf("[%lu] event=NOISE count=%lu\r\n", now_ms, g_count_noise);
pushEventLine("NOISE #%lu", g_count_noise);
} else if (intVal == DISTURBER_INT) {
g_count_disturber++;
strncpy(g_last_event_name, "DISTURBER", sizeof(g_last_event_name) - 1);
Serial.printf("[%lu] event=DISTURBER count=%lu\r\n", now_ms, g_count_disturber);
pushEventLine("DIST #%lu", g_count_disturber);
} else if (intVal == LIGHTNING_INT) {
g_count_lightning++;
g_latched_lightning = true;
g_last_distance = lightning.distanceToStorm();
g_last_energy = lightning.lightningEnergy();
g_last_lightning_ms = now_ms;
const time_t now_epoch = time(nullptr);
const uint32_t ts_epoch = (now_epoch > 1700000000) ? static_cast<uint32_t>(now_epoch) : 0;
addStrikeRecord(ts_epoch, g_last_distance, g_last_energy);
if (!saveStrikeStore()) {
Serial.println(F("warn: strike_store_save_failed"));
}
strncpy(g_last_event_name, "LIGHTNING", sizeof(g_last_event_name) - 1);
Serial.printf("[%lu] event=LIGHTNING count=%lu distance_km=%u energy=%lu arm=%d mute=%d\r\n",
now_ms, g_count_lightning, g_last_distance, g_last_energy,
g_in_arm.stable_active ? 1 : 0, g_in_mute.stable_active ? 1 : 0);
pushEventLine("LTG #%lu %uk", g_count_lightning, g_last_distance);
if (!g_in_mute.stable_active) startBuzzer(130, 2400);
} else {
strncpy(g_last_event_name, "OTHER", sizeof(g_last_event_name) - 1);
Serial.printf("[%lu] event=OTHER int=0x%02X\r\n", now_ms, intVal);
pushEventLine("OTHER 0x%02X", intVal);
}
}
void setup() {
pinMode(PIN_STATUS_LED, OUTPUT);
pinMode(PIN_BUZZER, OUTPUT);
buzzerOff();
pinMode(PIN_ARM_SW, INPUT_PULLUP);
pinMode(PIN_MUTE_SW, INPUT_PULLUP);
pinMode(PIN_RESET_BTN, INPUT_PULLUP);
pinMode(PIN_AS3935_IRQ, INPUT);
Serial.begin(115200);
const uint32_t serial_wait_start = millis();
while (!Serial && (millis() - serial_wait_start) < 2500) {
delay(10);
}
delay(120);
g_boot_ms = millis();
printBanner();
//Serial.flush();
bootTermAdd("FW %s", FW_REV);
if (!loadStrikeStore()) {
Serial.println(F("warn: strike_store_load_failed"));
memset(g_strikes, 0, sizeof(g_strikes));
g_strike_head = 0;
g_strike_count = 0;
bootTermAdd("LOG LOAD FAIL");
} else {
Serial.printf("strike_store_loaded count=%u\n", g_strike_count);
bootTermAdd("LOG %u", g_strike_count);
}
Wire.begin(PIN_OLED_SDA, PIN_OLED_SCL);
Wire.setClock(100000);
delay(30);
Serial.printf("oled_i2c_pins sda=D4 scl=D5 (gpio=%u,%u)\n", PIN_OLED_SDA, PIN_OLED_SCL);
i2cScan();
const bool have_3c = i2cPing(OLED_ADDR_A);
const bool have_3d = i2cPing(OLED_ADDR_B);
if (!have_3c && !have_3d) {
Serial.println(F("warn: no OLED address responded on I2C (0x3C/0x3D)"));
g_oled_ok = false;
} else {
g_oled_ok = tryOledInit(display32, OLED_ADDR_A, OLED_H_32) ||
tryOledInit(display32, OLED_ADDR_B, OLED_H_32) ||
tryOledInit(display64, OLED_ADDR_A, OLED_H_64) ||
tryOledInit(display64, OLED_ADDR_B, OLED_H_64);
}
if (!g_oled_ok) {
Serial.println(F("warn: OLED init failed (tried 0x3C/0x3D, 128x32/128x64), continuing headless"));
} else {
Serial.printf("oled=ok addr=0x%02X size=128x%u\n", g_oled_addr, g_oled_h);
oledPanelFlash();
oledBoot("OLED init OK", "");
bootTermAdd("OLED 0x%02X", g_oled_addr);
}
initDebounce(g_in_arm, millis());
initDebounce(g_in_mute, millis());
initDebounce(g_in_reset, millis());
Serial.printf("startup arm=%d mute=%d reset=%d\n", g_in_arm.stable_active ? 1 : 0,
g_in_mute.stable_active ? 1 : 0, g_in_reset.stable_active ? 1 : 0);
startupBuzzerTest(g_in_mute.stable_active);
SensorProfile profile = SENSOR_PROFILE_DEFAULT;
if (ENABLE_PROFILE_SELECT_SWITCH && g_in_mute.stable_active) profile = PROFILE_NOISY;
g_sensor = (profile == PROFILE_NOISY) ? PARAM_NOISY : PARAM_SENSITIVE;
Serial.printf("profile=%s (switch_select=%d)\n", g_sensor.name,
ENABLE_PROFILE_SELECT_SWITCH ? 1 : 0);
if (ENABLE_PROFILE_SELECT_SWITCH) {
Serial.println(F("profile_hint: set MUTE ON before boot to force NOISY"));
}
pushEventLine("BOOT %s", g_sensor.name);
bootTermAdd("PROFILE %s", g_sensor.name);
setupWiFiAndTime();
setupWebServer();
if (g_wifi_ok) {
Serial.println(F("web=READY port=80"));
bootTermAdd("WEB http://%s", WiFi.localIP().toString().c_str());
pushEventLine("WEB %s", WiFi.localIP().toString().c_str());
} else {
Serial.println(F("web=READY (local/offline)"));
bootTermAdd("WEB LOCAL");
}
SPI.begin(PIN_SPI_SCK, PIN_SPI_MISO, PIN_SPI_MOSI, PIN_AS3935_CS);
if (!lightning.beginSPI(PIN_AS3935_CS, 2000000)) {
faultHalt(FAULT_AS3935_INIT, "AS3935 beginSPI failed");
}
sensorConfigure(g_sensor);
if (!lightning.calibrateOsc()) {
faultHalt(FAULT_AS3935_CONFIG, "AS3935 calibrateOsc failed");
}
Serial.printf(
"AS3935 cfg: profile=%s afe=%s tuneCap_bits=%u tuneCap_pf=%u noise=%u watchdog=%u spike=%u minLight=%u\n",
g_sensor.name, (g_sensor.afe_mode == INDOOR) ? "INDOOR" : "OUTDOOR",
SENSOR_TUNE_CAP_BITS, lightning.readTuneCap(), g_sensor.noise_floor,
g_sensor.watchdog, g_sensor.spike, g_sensor.min_lightnings);
Serial.printf("startup_guard=ACTIVE stabilize_ms=%lu\n", static_cast<unsigned long>(STARTUP_STABILIZE_MS));
bootTermAdd("GUARD %lus", STARTUP_STABILIZE_MS / 1000UL);
Serial.println(F("M3 init complete. Waiting for startup guard..."));
oledBoot("M3 init complete", "Startup guard...");
pushEventLine("M3 READY");
g_boot_profile_assist_done = false;
delay(400);
}
void loop() {
const uint32_t now_ms = millis();
const uint32_t debounce_ms = 25;
if (updateDebounce(g_in_arm, now_ms, debounce_ms)) {
Serial.printf("[%lu] switch=ARM state=%s\n", now_ms, g_in_arm.stable_active ? "ON" : "OFF");
pushEventLine("ARM %s", g_in_arm.stable_active ? "ON" : "OFF");
}
if (updateDebounce(g_in_mute, now_ms, debounce_ms)) {
Serial.printf("[%lu] switch=MUTE state=%s\n", now_ms, g_in_mute.stable_active ? "ON" : "OFF");
pushEventLine("MUTE %s", g_in_mute.stable_active ? "ON" : "OFF");
}
if (updateDebounce(g_in_reset, now_ms, debounce_ms)) {
Serial.printf("[%lu] switch=RESET state=%s\n", now_ms,
g_in_reset.stable_active ? "DOWN" : "UP");
pushEventLine("RESET %s", g_in_reset.stable_active ? "DN" : "UP");
if (g_in_reset.stable_active) {
g_reset_press_active = true;
g_reset_long_handled = false;
g_reset_press_start_ms = now_ms;
} else if (g_reset_press_active) {
g_reset_press_active = false;
if (!g_reset_long_handled) {
g_latched_lightning = false;
g_count_lightning = 0;
g_count_noise = 0;
g_count_disturber = 0;
strncpy(g_last_event_name, "RESET", sizeof(g_last_event_name) - 1);
g_last_lightning_ms = 0;
Serial.printf("[%lu] action=RESET_ACK counters_cleared\r\n", now_ms);
pushEventLine("COUNTERS CLR");
if (!g_in_mute.stable_active) startBuzzer(180, 2200);
}
}
}
if (g_reset_press_active && g_in_reset.stable_active && !g_reset_long_handled &&
(now_ms - g_reset_press_start_ms) >= RESET_LONG_PRESS_MS) {
g_reset_long_handled = true;
const SensorProfile new_profile = (profileCode() == 1) ? PROFILE_SENSITIVE : PROFILE_NOISY;
applyProfileRuntime(new_profile, true);
Serial.printf("[%lu] action=PROFILE_TOGGLE via_reset_long_press_ms=%lu\n", now_ms,
static_cast<unsigned long>(RESET_LONG_PRESS_MS));
if (!g_in_mute.stable_active) {
startBuzzer(130, (profileCode() == 1) ? 2800 : 1800);
}
}
if ((now_ms - g_last_heartbeat_ms) >= 500) {
g_last_heartbeat_ms = now_ms;
if (g_in_arm.stable_active) {
digitalWrite(PIN_STATUS_LED, !digitalRead(PIN_STATUS_LED));
} else {
digitalWrite(PIN_STATUS_LED, LOW);
}
}
maybeEnableAs3935Events(now_ms);
const bool event_path_allowed = g_event_logging_enabled && g_in_arm.stable_active &&
!g_in_reset.stable_active &&
(int32_t)(now_ms - g_profile_quiet_until_ms) >= 0;
if (event_path_allowed) {
handleAs3935Event(now_ms);
}
web.handleClient();
updateWiFiAndTimeRetry(now_ms);
maybeApplyBootProfileAssist(now_ms);
updateBuzzer(now_ms);
if ((now_ms - g_last_oled_ms) >= 180) {
g_last_oled_ms = now_ms;
if (g_event_logging_enabled) {
oledLive(now_ms);
} else {
oledBootDiag(now_ms);
}
}
}Bench Walk-Through (Current Prototype)
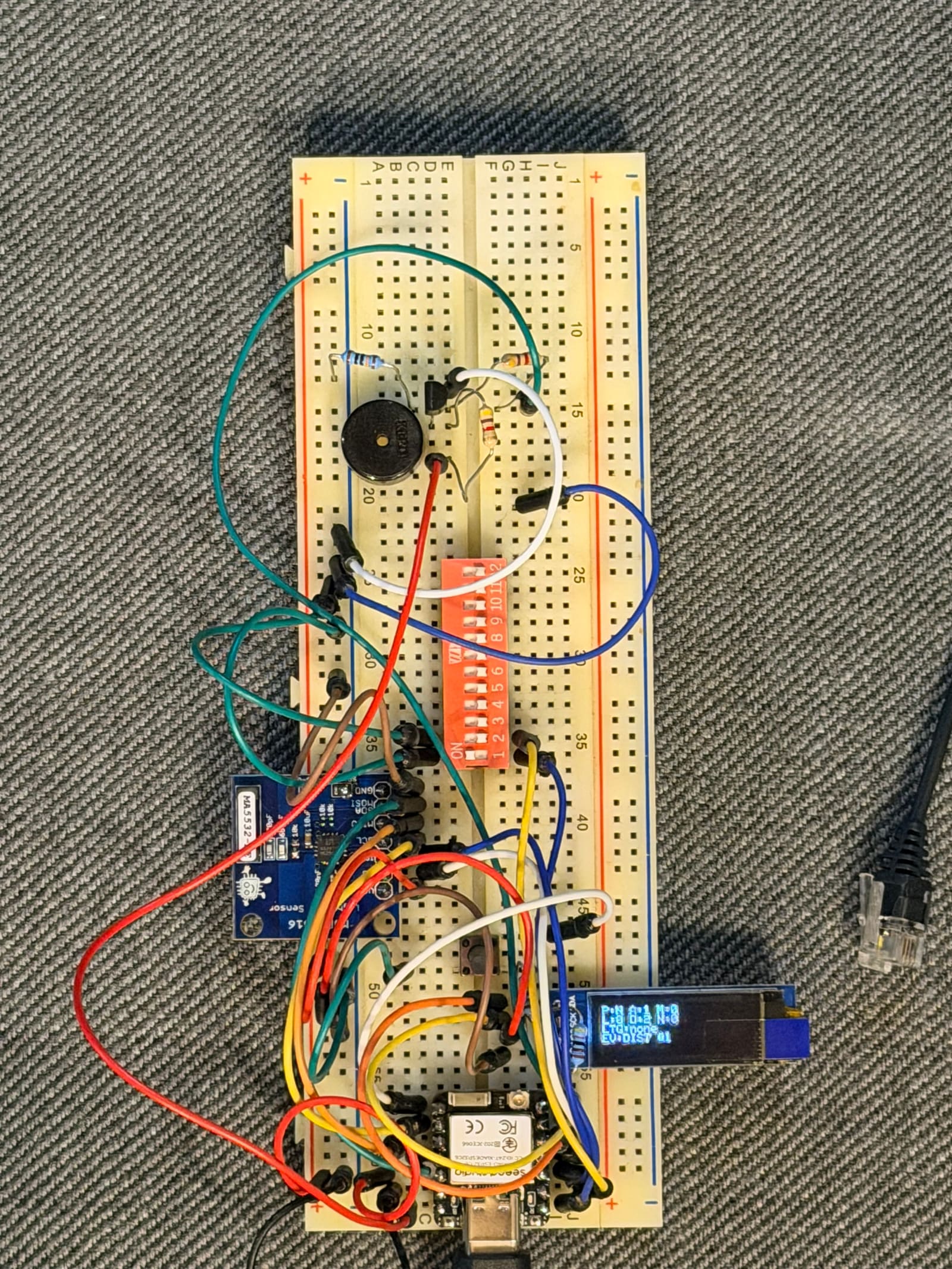



Build It Yourself: Step-by-Step
Use this as a step-by-step guide. Each step has three parts: what to do, what you should see, and where to look if it does not behave.
Step 1: Build the core hardware setup
Do
- Wire MCU + AS3935 SPI + IRQ first.
- Add OLED I2C next (
D4/D5). - Add ARM/MUTE/RESET with active-low pull-up logic.
- Add buzzer transistor stage and collector pull-up used in this build.
Expect
- No thermal issues at first power-on.
- Stable 3.3V and 5V rails under idle load.
- No floating control input behaviour.
If Not
- Re-check common ground across all sub-circuits.
- Confirm AS3935
SIis tied correctly for SPI mode. - Verify PN2222A pinout orientation before firmware debugging.
Step 2: Run pre-power and continuity gates
Do
- Check for
3V3toGNDshorts. - Check IRQ continuity from AS3935 to
D2. - Check buzzer path continuity from
D6through transistor stage.
Expect
- No hard short conditions.
- Consistent continuity on signal paths that matter for bring-up.
If Not
- Stop before flashing firmware.
- Resolve continuity and rail issues first, then restart from this step.
Step 3: Flash M1 and validate event classification
Do
- Flash
m1_bringup.ino. - Open serial monitor at
115200. - Trigger bench events (piezo click + local EMI source).
Expect
- Boot banner and profile line.
- Classified event output for
NOISE/DISTURBER/LIGHTNING. - Hex fault output if startup fails (
0x1XXfamily).
If Not
- If flooded with noise, boot with MUTE ON to force NOISY profile.
- If no events, verify tune cap and oscillator calibration path.
- If no serial behaviour, re-check board target and upload port.
Step 4: Flash M2 and validate operator UX paths
Do
- Flash
m2_core.ino. - Test ARM/MUTE/RESET transitions.
- Test buzzer startup and reset chirp behaviour.
Expect
- OLED ACK/detection at
0x3Cor0x3D. - Debounced input edge logs.
- OLED counters and recent-event line update correctly.
If Not
- If OLED reports odd success, trust I2C ACK checks over init alone.
- If buzzer is silent, run
buzzer_test.inobefore touching sensor code. - If reset behaviour is inconsistent, probe switch line transitions at pin level.
Step 5: Move to M3 only after M2 is stable
Do
- Flash
m3_connected.inowith local credentials. - Validate Wi-Fi connect and NTP sync.
- Trigger strikes and query API endpoints.
Expect
- Network status and sync state in startup output.
- Strike persistence in NVS ring buffer.
- HTTP responses from
/,/api/status,/api/strikes.
If Not
- First verify M2 local behaviour is still stable.
- Then isolate network issues (credentials, AP reachability, time servers).
- Finally verify persistence independently from API serving.
Wiring Matrix
| Signal | XIAO Pin | Direction | Wiring Rule |
|---|---|---|---|
| ARM switch | D0 | Input | INPUT_PULLUP, active low |
| MUTE switch | D1 | Input | INPUT_PULLUP, active low |
| AS3935 IRQ | D2 | Input | External interrupt source |
| AS3935 CS | D3 | Output | SPI CS |
| OLED SDA / SCL | D4 / D5 | I/O / Output | I2C bus |
| Buzzer drive | D6 | Output | 1k base resistor into PN2222A |
| RESET/ACK | D7 | Input | INPUT_PULLUP, active low |
| SPI SCK/MISO/MOSI | D8 / D9 / D10 | SPI | AS3935 bus |
Firmware Snapshot (Current)
M2 Revision
M2_CORE_R3_2026-03-07
M3 Revision
M3_CONNECTED_R1_2026-03-08
Tune Cap
bits=7 (56 pF)
Boot Profile Rule
MUTE ON at boot -> NOISY
AS3935 Working Profiles
| Profile | AFE | Noise Floor | Watchdog | Spike Rejection | Min Lightning |
|---|---|---|---|---|---|
SENSITIVE | Indoor | 2 | 1 | 1 | 1 |
NOISY | Outdoor | 7 | 6 | 6 | 1 |
Active Firmware Files
| Stage | File | Status |
|---|---|---|
| M1 bring-up | firmware/m1_bringup/m1_bringup.ino | Complete base build |
| M2 core UX | firmware/m2_core/m2_core.ino | Signed off on hardware |
| M3 connected | firmware/m3_connected/m3_connected.ino | In active development |
| Buzzer isolation | firmware/buzzer_test/buzzer_test.ino | Test utility |
Troubleshooting by Symptom
Build Fails Before Compile
- Use explicit XIAO ESP32-C6 board target.
- Avoid generic family FQBN profiles that break partition expansion.
Flood of Noise Events
- Boot with MUTE ON to force
NOISY. - Confirm tune cap and calibration are applied.
OLED Says Nothing
- Check I2C ACK presence at
0x3C/0x3D. - Do not trust init success alone without ACK confirmation.
Buzzer Not Audible
- Validate PN2222A pinout and resistor continuity.
- In this build, keep the
+5V -> 4.7k -> collectorpull-up.
Fault Code Groups
| Code | Meaning |
|---|---|
0x101 | AS3935 initialization failure |
0x102 | AS3935 configuration/calibration failure |
0x103 | AS3935 IRQ attach failure |
0x201 | OLED initialization failure |
0x301 | Strike-log load failure (M3) |
0x302 | Strike-log save failure (M3) |
Still To Do
- Finish M3 web/API behavior under real station network conditions.
- Replace bench credential constants with a safer deployment configuration path.
- Verify strike ring persistence behavior through repeated power cycles.
- Package enclosure and service layout so field maintenance is simpler.